Ayudando a arquitectos y estudiantes a encontrar información desde 1998
El Buscador de Arquitectura se dedica a investigar, recopilar y clasificar la información sobre Arquitectura y Construcción disponible en Internet, creando una enorme colección de información. Los arquitectos, estudiantes y personas interesadas en el tema, puedan encontrar fácilmente la información que necesitan para su desarrollo personal, profesional o entretenimiento.
Noticias : Tecnología : Robots que construyen y recopilan datos: así avanza la construcción autónoma en todo el mundo
Noticias de Arquitectura
Robots que construyen y recopilan datos: así avanza la construcción autónoma en todo el mundo
Descubre cómo la robótica está revolucionando la construcción a nivel global. Desde los pioneros japoneses, capaces de levantar y fijar paneles de yeso de manera autónoma, hasta los robots actuales que recopilan datos en tiempo real, capturan imágenes en 360 grados y generan reportes de avance precisos.
(Lun, 08 Jun 2026)
La construcción del futuro ya es una realidad global. Tilbury Douglas ha puesto a trabajar un robot humanoide en sitios de obra activos, capaz de desplazarse de manera autónoma, capturar imágenes en 360 grados y generar reportes de avance detallados.
Esta tecnología no solo ahorra hasta 40 horas de trabajo al mes, sino que también mejora la seguridad, supervisando riesgos y asegurando el cumplimiento de normas, mientras los trabajadores humanos pueden concentrarse en las tareas que requieren su experiencia y juicio profesional.
Mark Buckle, Director Técnico de Tilbury Douglas, comenta: “La industria de la construcción enfrenta escasez de talento y desafíos constantes de recursos. Con tecnología innovadora como este robot, automatizamos procesos clave, apoyamos a nuestros equipos y potenciamos la experiencia humana donde más se necesita.”
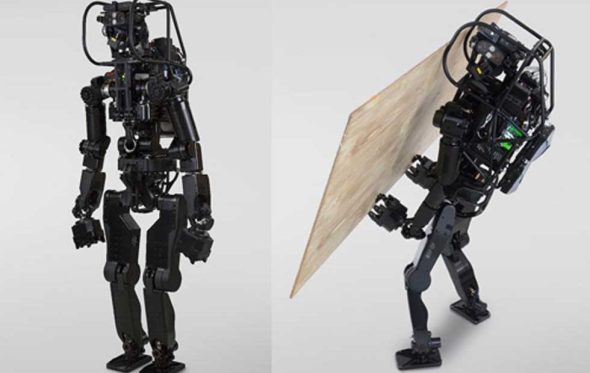
Este avance se apoya en décadas de investigación y desarrollo en robótica de construcción. Por ejemplo, el HRP-5P, desarrollado por el Instituto Nacional de Ciencia y Tecnología Industriales Avanzadas (AIST) en Japón, tenía como objetivo reemplazar a los humanos en trabajos repetitivos y en entornos peligrosos.
Este robot humanoide podía realizar tareas en sitios de construcción, como seleccionar paneles de yeso de una pila y atornillarlos en su posición, contando con capacidades inteligentes de medición del entorno, reconocimiento de objetos, planificación de movimientos de todo el cuerpo, tecnología de control y descripción de tareas.
Con 1.82 metros de altura y 101 kilogramos de peso, el HRP-5P, último prototipo del Humanoid Research Group (HRG) del AIST, podía caminar hacia una mesa, recoger un panel de yeso y fijarlo a la pared con un destornillador eléctrico incorporado.
Durante las pruebas, cartografiaba su entorno, se apoyaba en la mesa para recoger materiales, identificaba y tomaba las herramientas necesarias y completaba la instalación del panel de manera autónoma.
Su desarrollo estaba dirigido a sustituir tareas en la construcción de grandes estructuras como edificios, casas, aviones y barcos. Con 2 grados de movimiento en el cuello, 3 en la cintura, 8 en cada brazo, 6 en cada pierna y 2 en cada mano, podía manipular objetos grandes como hojas de triplay estándar y paneles de yeso.
Además, era dos veces más rápido que versiones anteriores gracias a un sistema de transmisión conjunta con varios motores y podía navegar por zonas parcialmente obstruidas utilizando la memoria de sus sensores 3D montados en la cabeza.
De los experimentos pioneros del HRP-5P a la recopilación de datos en tiempo real de los robots actuales, la construcción ha entrado en una nueva era. La automatización y la inteligencia robótica no solo ejecutan tareas, sino que transforman la manera en que se planifica, supervisa y ejecuta cada proyecto. La pregunta ya no es si la robótica cambiará la construcción, sino cuándo cada obra en el mundo contará con su propio asistente robótico.

 Boletín de Arquitectura
Boletín de Arquitectura RSS
RSS Twitter
Twitter Facebook
Facebook